使用简介
成品说明
组装完成的轮足机器人如下图所示:

通过遥控器(如下图所示)控制轮足机器人运动。目前可做运动有:前进/后退,左转/右转,升高/降低腿。

操作步骤
主要用到遥控器的 5 个按键:
- 开关①(位于遥控器的左上)
- 开关②(位于遥控器的右上)
- 摇杆③(位于遥控器的左中)
- 摇杆④(位于遥控器的右中)
- 电源⑤(位于遥控器的中央)

以下是简要的使用流程。
一、先打开遥控器
1.1 确保 [开关①] 打在 [上]。该开关可以拨在[上][中][下]共3个位置。
1.2 确保 [开关②] 打在 [中]。该开关可以拨在[上][中][下]共3个位置。
1.3 确保 [摇杆③] 打在 [最下]。该摇杆可上下左右拨动。上下拨动,松手后不会回中;左右拨动,松手后自动回中。
1.4 [摇杆④] 在中间。该摇杆可上下左右拨动,松手后自动回中。
1.5 长按 [电源⑤] 数秒,听到2声蜂鸣即表示打开了。
二、然后给轮足机器人上电
2.1 用单手端着轮足机器人的品字型白框,品字型上面口朝外,下面2个口朝向身体。大致端水平,在空中不着地。
2.2 另一只手打开轮足机器人的电源开关,即按下开关到[1]的位置。
2.3 然后等待轮足机器人完成启动,约需要等待 10 秒。轮足机器人启动完成时,2个腿会缩起来,并且2个轮子会开始飞快转动。
三、控制轮足机器人运动
3.1 将2个腿缩起的、2个轮子飞快转动的轮足机器人,放到开阔的地面等上,2个轮子着地。
3.2 轮足机器人能“站”在地面上,并缓慢的往前往后反复运动(为了保持能“站”在地面?!)
3.3 [摇杆③] 向上慢慢打,轮足机器人能慢慢站直(可以过小障碍?!);向下慢慢打,轮足机器人能慢慢蹲下。
3.4 [摇杆④] 上下左右慢慢打,可控制轮足机器人前后左右运动。以轮足机器人的品字型白框为基准,轮足机器人能向前(摇杆向[上])、向后(摇杆向[下])、左转(摇杆向[左])、右转(摇杆向[右])。
其他
轮足机器人电量不足时,需要充电。充电一小时,即可。没有指示灯等表示充电完成。
组装调试
组装部件
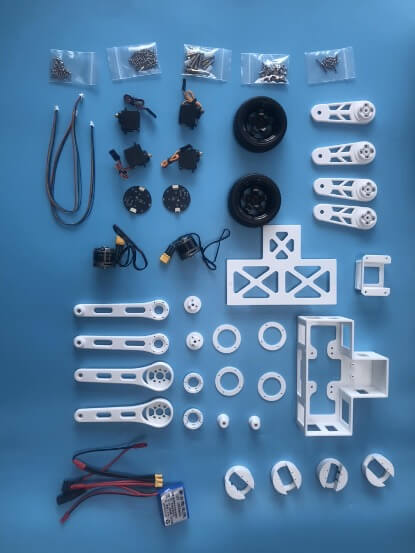
有一堆3D打印件、螺丝、舵机、电机、轮子、品字型白框等,用于组装。如下图所示:
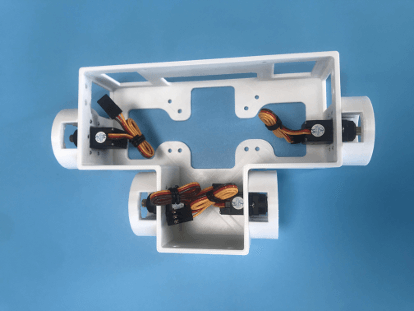
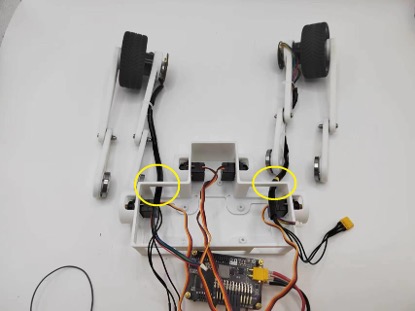
4个舵机装入品字型白框,如下图所示:
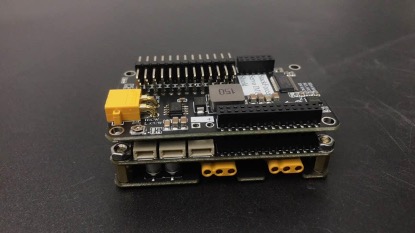
3块电路板,如下图所示:
上:舵机控制板。接舵机和遥控器接收器。
中:主控板。接电机(在大腿底部和轮子相连处)。
下:电源板。
基本完成,如下图所示:
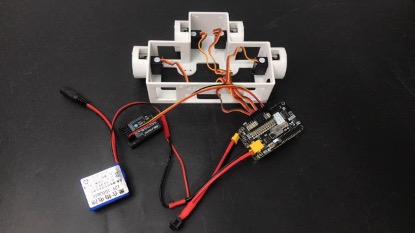
基本完成待烧录程序和调试,如下图所示:
烧录调试
VSCode 安装插件后即可直接烧录程序到轮足机器人的电路板。主要步骤如下:
1、VSCode 安装 PlatformIO IDE
![]() 插件。
插件。
2、轮足机器人的电路板,通过 USB线,和电脑相连。
3、在 VSCode 中打开要烧录程序的文件夹。
4、按操作文档对程序做必要的修改(比如,在某个文件中输入正确的注册码,等),然后点击VSCode安装 PlatformIO IDE插件后在界面底部新增的 [烧录] 按钮,即可完成烧录。
关于 PlatformIO,可以访问官网 https://platformio.org/🔗
获取更多信息。也可以阅读以下文章做初步了解:
- vscode +
PlatformIO嵌入式芯片开发环境搭建🔗
- 使用下一代的嵌入式IDE-PlatformIO 教程🔗
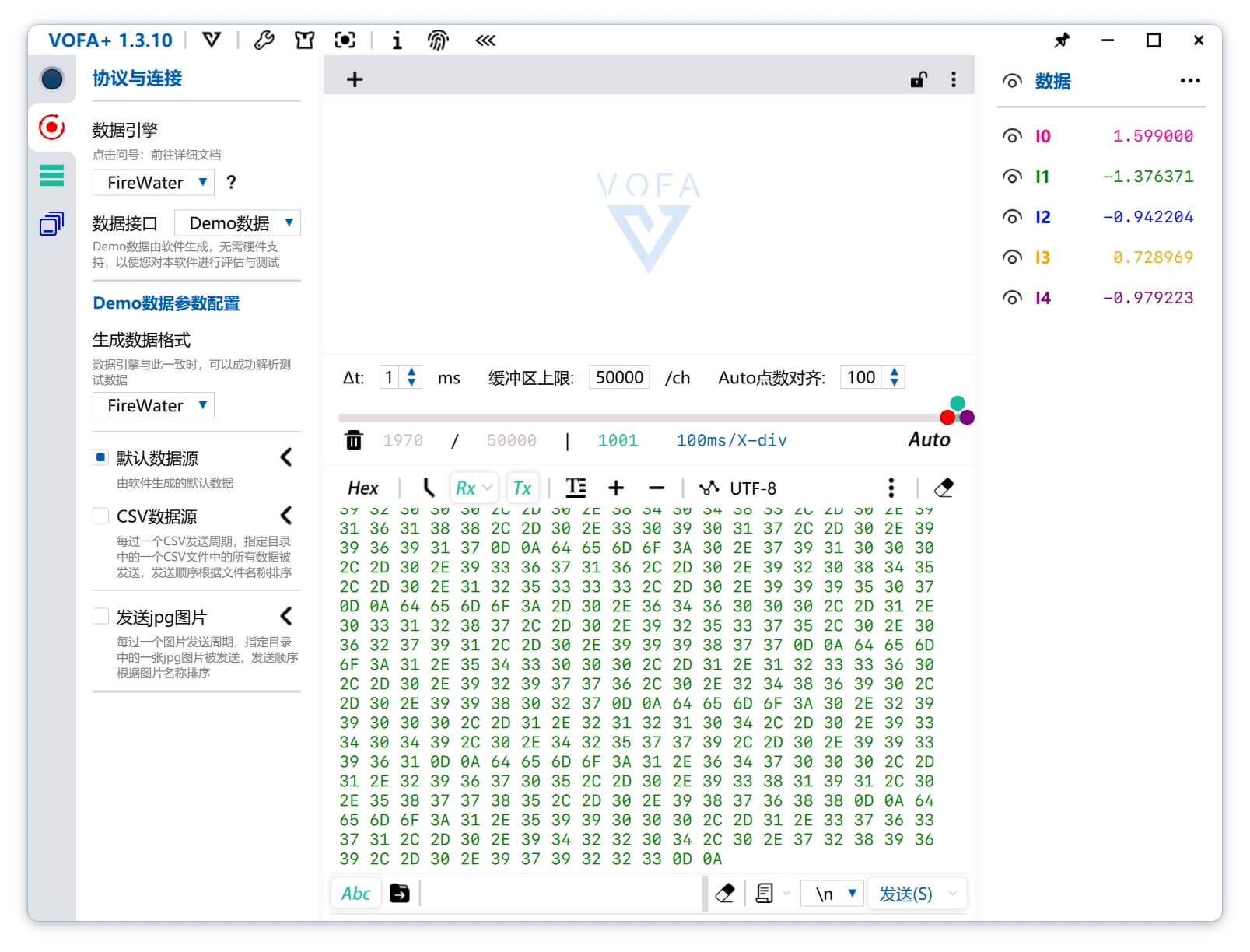
烧录程序后,还使用 VOFA+ (https://www.vofa.plus/🔗)测试和调优,轮足机器人通过 USB
串口和电脑相连。比如:轮子是否被识别到,轮子转动是否丝滑,让4个舵机转动微小角度确保腿部的大腿和品字型白框垂直,等等。
相关源码
有3个源代码,如下:
点击下载 BLDC_Control-241105.zip(主控板源代码)
主控板相关源代码
点击下载 bipedal-241105.zip(舵机板源代码)
舵机板相关源代码
点击下载
bipedal_calibrate-241105.zip(舵机板校准源代码)
轮足机器人的大腿,是和舵机漏出的齿轮相连的。要求大腿部件,和品字型白框基本垂直。大腿部件上的齿轮和舵机漏出的齿轮(非运动状态时是锁定的)相连,初始状态不一定能保证大腿垂直。该校准程序用于让舵机转动很小的角度,以便让大腿垂直。4个舵机转动的角度记录下来,然后填入
bipedal-241105.zip 中的相关文件中,并烧录到舵机板。
相关文档可参考: 点击下载《轮足校准先看.pdf》